
设备方位不妥等原因,当车辆彻底停下后距发卡机间隔较远,司机伸手无法顺畅取卡。为处理该问题,在主动发卡机上添加滑动渠道,使用功用检测车辆离发卡机的间隔,主动弹性平移,缩短车辆与发卡机的间隔,防止司机下车取卡,完成安全、便利、便利取卡通行,节约取卡时刻,添加通行功率。
作者简介:黄涛(1983—),男,南昌人,工程师,首要研讨方向为高速公路机电设备的研制。邮箱:。
物体振荡时都会宣布动静。在物理学上,频率的界说为物体每一秒振荡的次数,单位为赫兹。超声波是高于两万赫兹的声波[1]。超声波测距传感器包含超声波发射器和超声波接纳器,经过发射器向某一方向发射必定频率的超声波(频率一般大于20 kHz),在发射超声波的一起开端计时,超声波在空气中传达碰到障碍物马上反射回来,超声波接纳器收到反射回来的超声波后当即中止计时。超声波测距传感器便是使用超声波在空气中传达,碰到障碍物往复时刻,再乘以超声波传输速度,即可求得间隔障碍物的间隔,原理示意图如图1 所示。
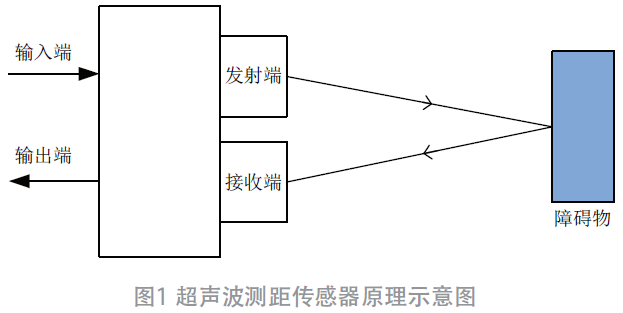
假定S 为被测障碍物到测距仪的间隔,超声波往复时刻为 t,超声波传达速度为 v,则被测间隔S = vt / 2。
高速公路主动发卡机包含上工位和下工位发卡箱体,别离用于大型车辆和小型车辆发卡,首要硬件操控电路包含以STM32 单片机为主操控芯片的操控电路、上工位测距仪、上工位箱体移动电机及驱动电路、上工位箱体刹车机及驱动电路、下工位测距仪、下工位箱体移动电机及驱动电路、下工位箱体刹车机及驱动电路、车检器和车型辨认器,体系示意图如图2 所示。
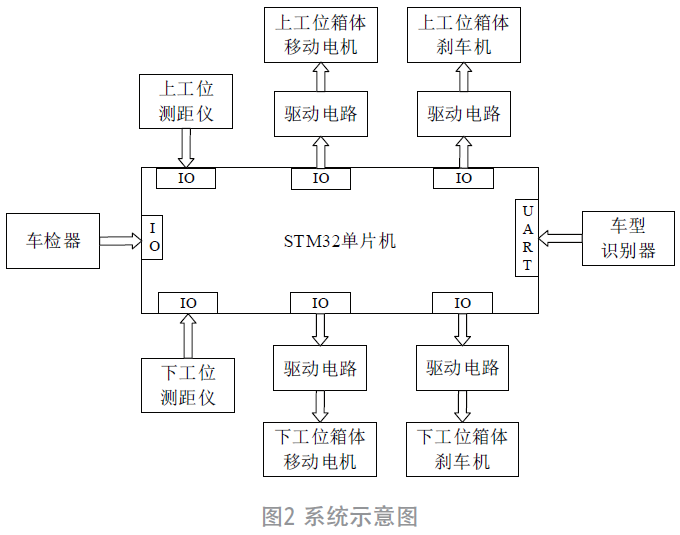
当车辆进入收费车道时,车型辨认器主动辨认车辆类型,并将车型数据经过RS-485 串口发送至发卡机。随后,车辆行进至取卡方位,车检器检测到车辆,发卡机根据车辆类型判别上工位仍是下工位发卡,大型车辆为上工位发卡,小型车辆为下工位发卡。根据超声波测距传感器丈量到的发卡机箱体间隔车辆的间隔,发卡机箱体滑动设备主动调理箱体移出间隔。
超声波测距传感器选用老练安稳牢靠的超声波雷达技能,测距规模广,可精确勘探到0~3 m 以内的障碍物间隔,测距精度能够到达1 cm,结合滑动渠道移动伸出适宜间隔,确保经过主动发卡车道的车辆驾驭人员能便利安全地取到通行卡,一起防止发卡机碰撞到车辆。超声波测距传感器通讯电气接口为单线UART 方法,高电平(+5 V)为逻辑1,低电平(0 V)为逻辑0,空闲时为高电平。整个通讯协议由5 个有次序的信息码组成,别离是P0、P1、P2、P3、P4,其间P0 固定为0xC4,P1、P2、P3、P4 别离对应4 个测距探头(本项目选用的超声波测距传感器有4 个探头)的测距数据,信息码的波形时序图如图3 所示。
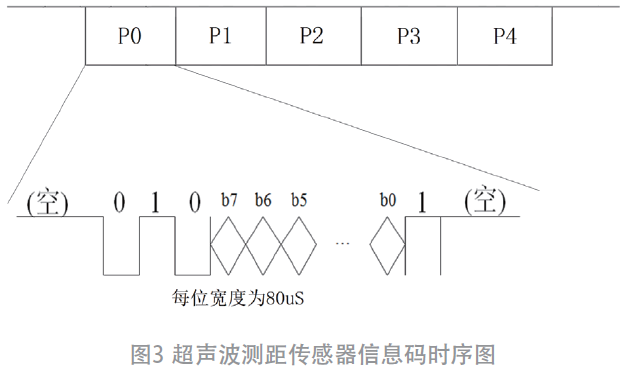
每个信息码由“前导码(010)”、8 bit 数据码、1 个中止位组成,共12 个bits,即Pi=010+Di+1,其间i 别离为0、1、2、3、4,信息码的每个bit 时刻宽度固定为80 μs。
超声波测距传感器数据码界说:P0,操控码,固定为0×C4;P1、P2、P3、P4:对应4 个测距探头的测距数据,在信息码时序图的表现为从左至右次序,单位为2 cm,取值规模是0 ~ 150,对应的丈量间隔为0.0~3.0 m,例如0×10 代表32 cm。特别值0xFF 代表无穷远,即没有勘探到障碍物。
将超声波测距传感器的数据输出线接入单片机I/O端口,并设置为外部中止,下降沿触发。当传感器有测距数据输出时,单片机触发下降沿中止,延时40 μs 后,翻开80 μs 的定时器中止,在定时器中止中读取5 个信息码的每一位数据。
滑动渠道选用24 V直流电机操控滑动渠道的弹性,在承载100 kg 质量情况下能平稳滑动,滑动渠道最大可弹性间隔能到达200 mm。车辆间隔发卡机较远时,滑动渠道可彻底伸出200 mm,车辆间隔发卡机较近时,滑动渠道可滑动适宜间隔而不碰撞到车辆,便利司机安全取卡或刷卡。弹性间隔根据机箱外壳上所配4 个超声波测距传感器探头丈量车辆间隔机箱的间隔而定,当间隔大于设定值时,滑动渠道主动水平伸出,按键取卡后,机箱主动缩回原位。
主操控板单片机程序选用C 言语编写,与汇编比较,C 言语在功用、结构性、可读性、可维护性方面有显着优势,易学易用。
主操控程序首要包含车型数据接纳、车检器中止、超声波测距传感器数据接纳、箱体移动和刹车等作业。车型数据选用串口中止方法接纳数据包;车检器用于检测车辆是否停在取卡方位,为开关量信号,接入单片机的外部中止输进口;箱体移动包含箱体伸出和退回原位,以及加速度、恒速和减速度,由中止状况启动时为加速度移动,中心移动速度为恒速移动,在挨近中止方位时为减速度移动,箱体移动流程图如图4 所示。

超声波测距传感器具有简略便利、易于完成、成本低、精度高、不易受环境影响等特色,能够勘探通明物体,包含从玻璃和液体外表反射的回波,还能反抗雾气、尘埃和尘垢颗粒,可安稳地勘探出杂乱形状的物体,比方网格托盘、绷簧等。在3 m 测距规模内,与红外或激光等测距方法比较具有显着的优势,在日常日子中使用广泛,如倒车辅佐体系、智能导盲体系、移动机器人、液位丈量等。
上一篇:超声波传感器在无人机测距范畴中的运用 下一篇:超声波传感器在机器人感知体系中的运用